The Robot
This is the Robot's main functions, and a gallery.
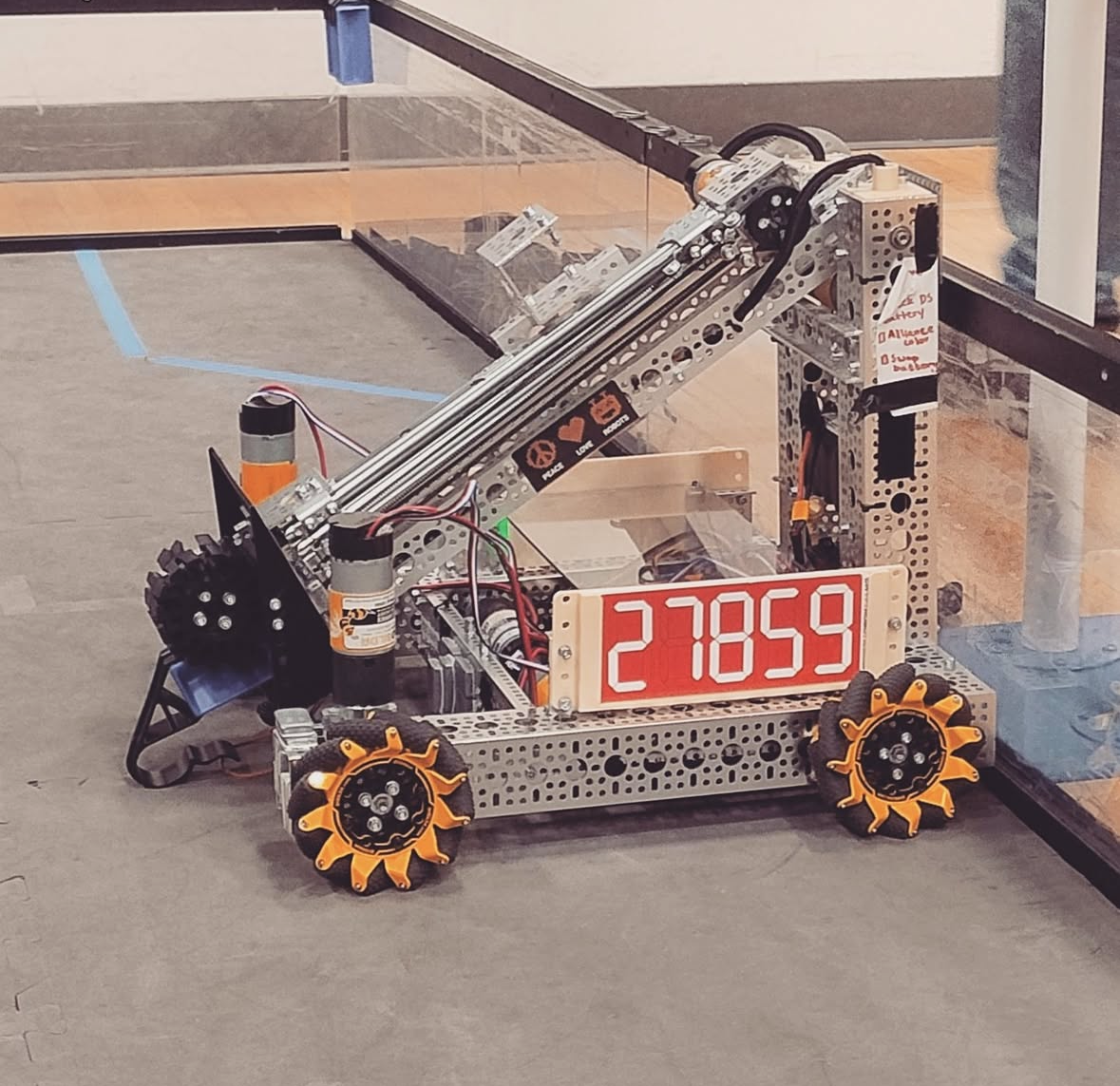
This robot is a Gobilda kit that has been heavily modified for winning this year's competitions. It features a viper kit for scoring in the high basket, and mechanum wheels for fast movement. Additionally, we have a robust auto system, and are going to implement more complex systems like Pedro pathing over the off season. The robot has helped us achieve an OPR of over 90, and we hope to see that only increase as time goes on. Our autonomous modifications have been focused on improving the robot's ability to score specimens accurately and efficiently. We have implemented a dvanced sensor systems and machine learning algorithms to enhance the robot's decision-making ca pabilities during autonomous periods. This allows the robot to identify and score specimens with precision, even in complex and dynamic environments. Our goal is to continuously refine these syste ms to achieve higher accuracy and faster scoring in future competitions.